


Pozycjoner jednoosiowy/automatyczny pozycjoner spawalniczy
Parametry techniczne
| Jednoosiowy poziomy serwomechanizm pozycjonujący | Serwopozycjoner osi głównej typu jednoosiowego | Serwopozycjoner jednoosiowy typu wrzeciona | |||||||||
| Numer seryjny | PROJEKTOWANIE | Parametr | Parametr | UWAGI | Parametr | Parametr | Parametr | UWAGI | Parametr | Parametr | UWAGI |
| 1. | Obciążenie znamionowe | 200 kg | 500 kg | W promieniu R300mm/R400mm od osi głównej | 500 kg | 800 kg | 1200 kg | W promieniu R400mm/R500mm/R750mm od osi głównej | 200 kg | 500 kg | Znajduje się w promieniu R300mm od osi wrzeciona Wewnętrzny, odległość środka ciężkości od kołnierza ≤300 mm |
| 2. | Standardowy promień żyracji | R300mm | R400mm | R600mm | R700mm | R900mm | R600mm | R600mm | |||
| 3. | Maksymalny kąt obrotu | ±360° | ±360° | ±360° | ±360° | ±360° | ±360° | ±360° | |||
| 4. | Znamionowa prędkość obrotowa | 70°/S | 70°/S | 70°/S | 70°/S | 50°/S | 70°/S | 70°/S | |||
| 5 | Powtarzalna dokładność pozycjonowania | ±0,08 mm | ±0,10 mm | ±0,10 mm | ±0,12 mm | ±0,15 mm | ±0,08 mm | ±0,10 mm | |||
| 6 | Rozmiar poziomego dysku obrotowego | Φ600 | Φ800 | - | - | - | - | - | |||
| 7 | Wymiar graniczny ramy przemieszczenia (długość × szerokość × wysokość) | - | - | 2200 mm × 800 mm ×90 mm | 3200 mm × 1000 mm × 110 mm | 4200 mm × 1200 mm × 110 mm | - | - | |||
| 8 | Całkowite wymiary przesuwnika położenia (długość × szerokość × wysokość) | 770 mm × 600 mm × 800 mm | 900 mm × 700 mm × 800 mm | 2900 mm × 650 mm × 1100 mm | 4200 mm × 850 mm × 1350 mm | 5400 mm × 1000 mm × 1500 mm | 1050 mm × 620 mm × 1050 mm | 1200 mm × 750 mm × 1200 mm | |||
| 9 | Tarcza obrotowa wrzeciona | - | - | Φ360 mm | Φ400 mm | Φ450 mm | Φ360 mm | Φ400 mm | |||
| 10 | Wysokość środka pierwszego obrotu osi | 800 mm | 800 mm | 850 mm | 950 mm | 1100 mm | 850 mm | 900 mm | |||
| 11 | Warunki zasilania | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Z transformatorem izolacyjnym | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Z transformatorem izolacyjnym | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Z transformatorem izolacyjnym |
| 12 | Klasa izolacji | H | H | H | H | H | H | H | |||
| 13 | Masa netto sprzętu | Około 200 kg | Około 400 kg | Około 500 kg | Około 1000 kg | Około 1600 kg | Około 200 kg | Około 300 kg | |||
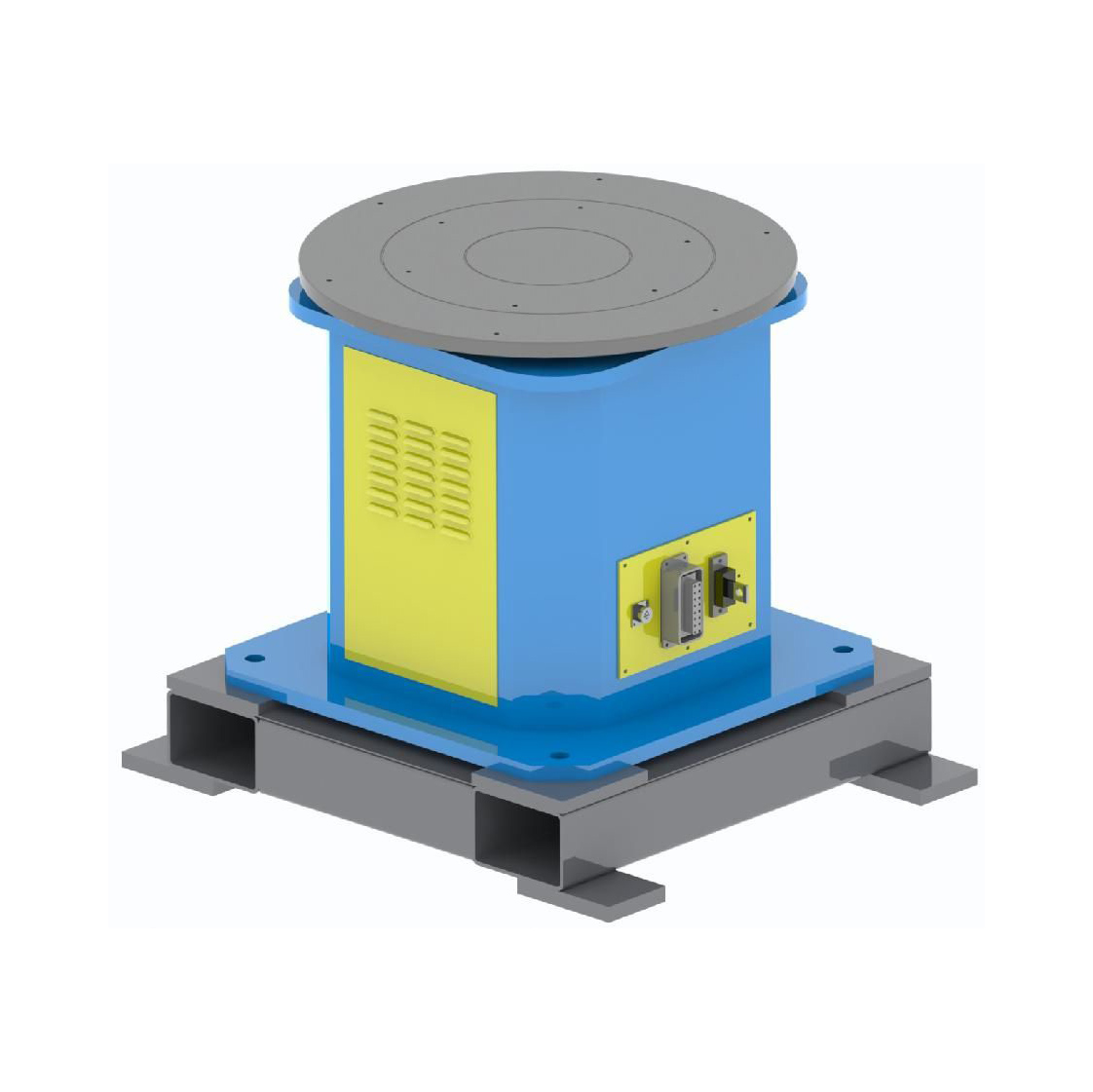
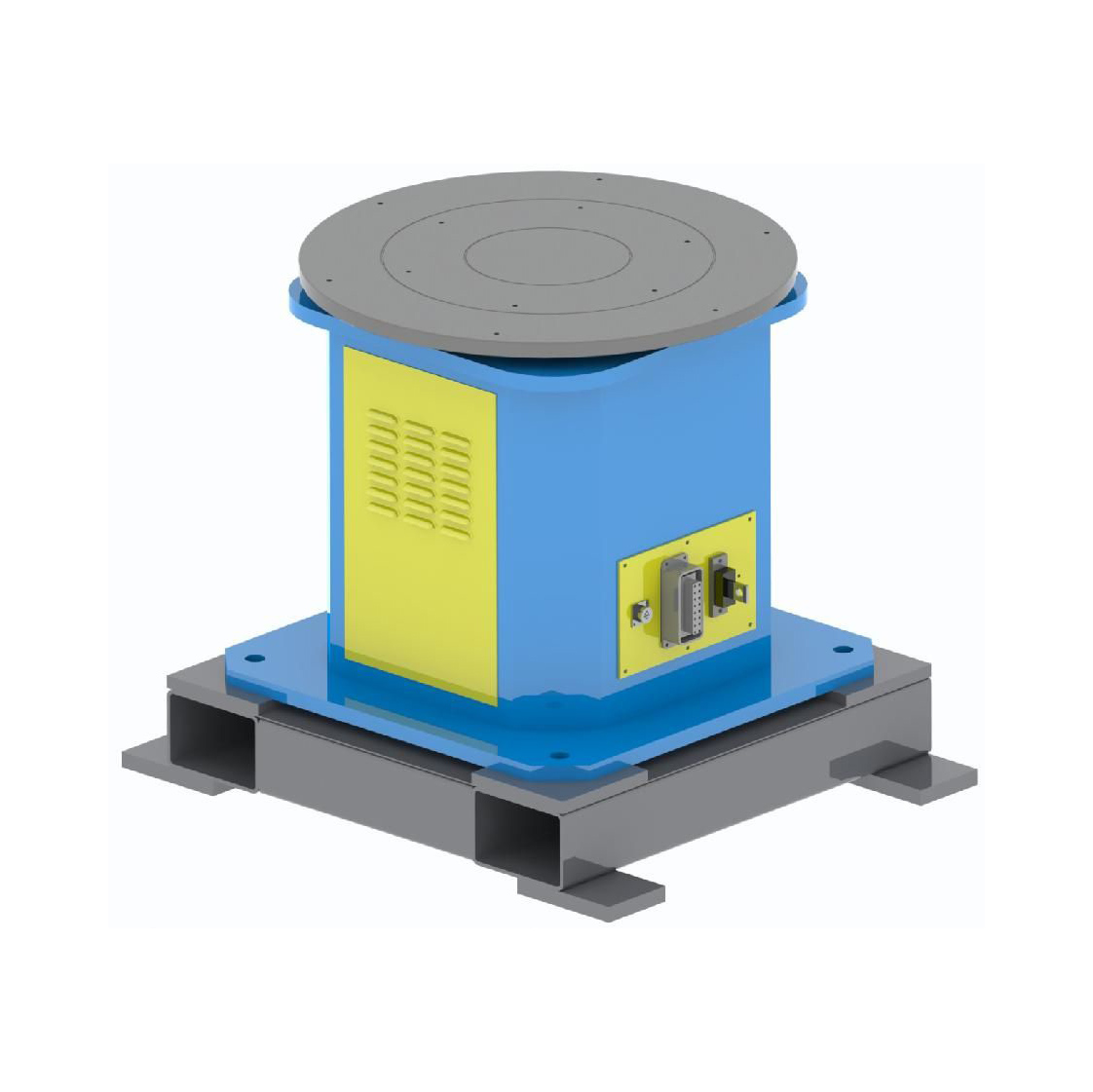
Jednoosiowy poziomy serwomechanizm pozycjonujący

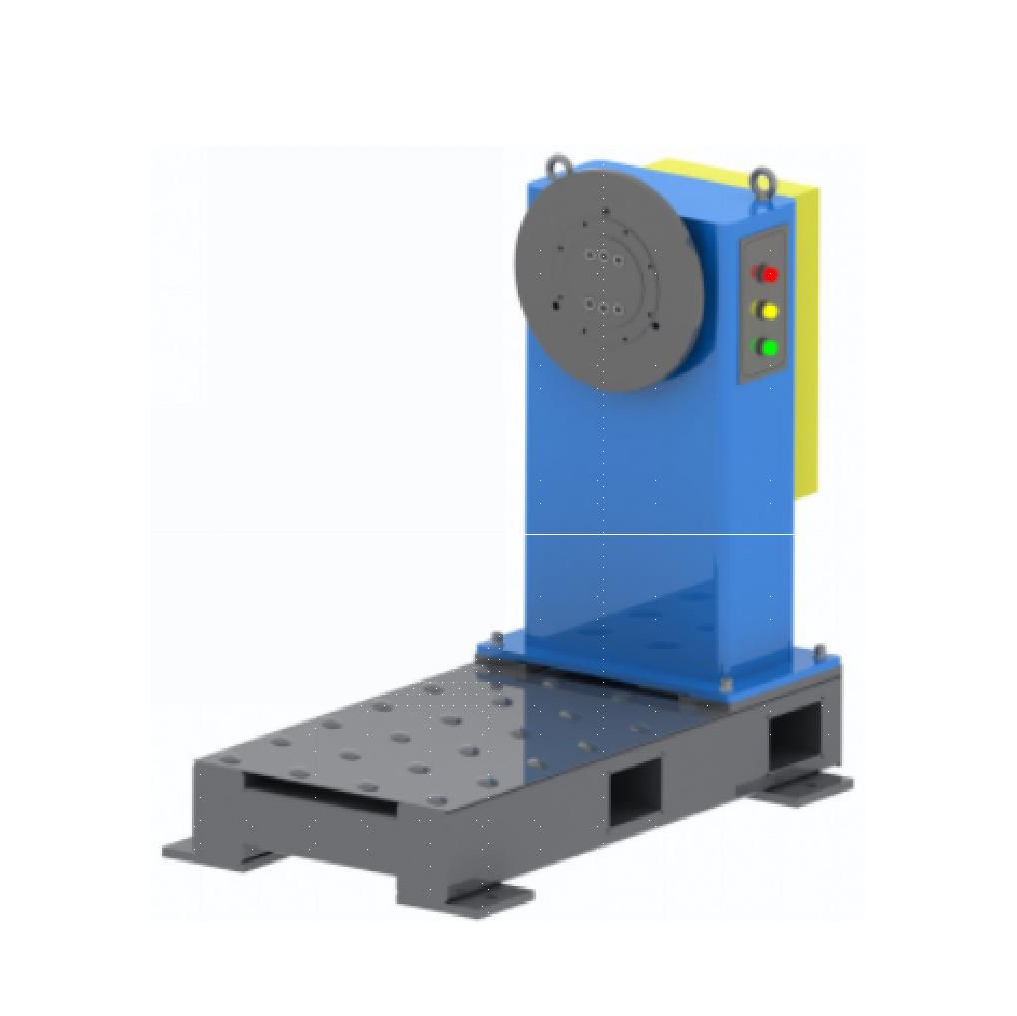
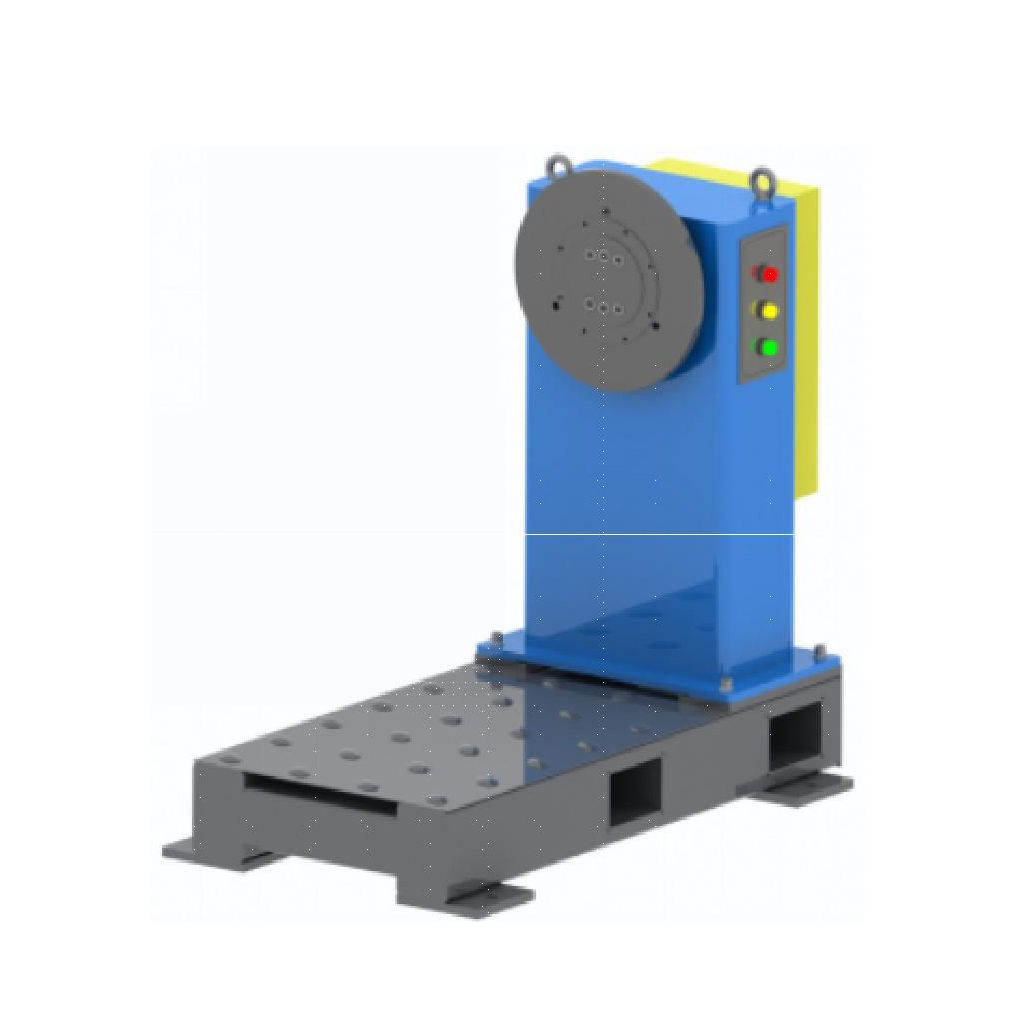
Serwopozycjoner osi głównej typu jednoosiowego
Serwopozycjoner jednoosiowy typu wrzeciona
Wprowadzenie do struktury
Jednoosiowy poziomy serwonapęd składa się głównie z integralnej, stałej podstawy, obrotowej skrzynki wrzeciona, poziomej tarczy obrotowej, serwosilnika prądu przemiennego i precyzyjnego reduktora RV, mechanizmu przewodzącego, osłony ochronnej oraz elektrycznego układu sterowania. Stała podstawa jest spawana z wysokiej jakości profili. Po wyżarzeniu i odprężeniu, zostanie poddana profesjonalnej obróbce mechanicznej, aby zapewnić wysoką dokładność obróbki i precyzję kluczowych pozycji. Powierzchnia jest natryskiwana farbą antykorozyjną, która jest piękna i błyszcząca, a kolor można dostosować do wymagań klienta.
Wysokiej jakości stal profilowa wybrana do wykonania obrotowej skrzyni wrzeciona gwarantuje jej długotrwałą trwałość i stabilność po spawaniu, wyżarzaniu i profesjonalnej obróbce. Pozioma tarcza obrotowa jest spawana z wysokiej jakości profili. Po obróbce wyżarzaniem, profesjonalna obróbka gwarantuje wysoki stopień wykończenia powierzchni i jej stabilność. Górna powierzchnia jest obrobiona otworami na śruby o standardowym rozstawie, co ułatwia klientom montaż i mocowanie narzędzi pozycjonujących.
Wybór serwosilnika prądu przemiennego i reduktora RV jako mechanizmu napędowego zapewnia stabilność obrotu, dokładność pozycjonowania, długą żywotność i niską awaryjność. Mechanizm przewodzący wykonany jest z mosiądzu, który charakteryzuje się dobrym przewodnictwem. Podstawa przewodząca posiada integralną izolację, która skutecznie chroni serwosilnik, robota i źródło zasilania spawarki.
W układzie sterowania elektrycznego zastosowano japoński sterownik PLC Omron do sterowania pozycjonerem, zapewniający stabilną pracę i niską awaryjność. Komponenty elektryczne pochodzą od renomowanych marek krajowych i zagranicznych, co gwarantuje jakość i stabilność użytkowania.








