




Serwopozycjoner dwuosiowy typu C/L/U
Parametry techniczne
| Serwopozycjoner dwuosiowy typu C | Serwopozycjoner dwuosiowy typu L | Serwopozycjoner dwuosiowy typu U | |||||||||||
| Numer seryjny | PROJEKTOWANIE | Parametr | Parametr | Parametr | UWAGI | Parametr | Parametr | Parametr | UWAGI | Parametr | Parametr | Parametr | UWAGI |
| 1 | Obciążenie znamionowe | 200 kg |
500 kg | 1000 kg | W promieniu R400mm/R400mm/R600mm od drugiej osi | 500 kg | 1000 kg | 2000 kg | W promieniu R400mm/R600mm/R800mm od drugiej osi | 1000 kg | 3000 kg | 5000 kg | W promieniu R600mm/R1500mm/R2000mm od drugiej osi |
| 2 | Standardowy promień żyracji | R400mm | R400mm | R600mm |
| R400mm | R600mm | R800mm |
| R600mm | R1500mm | R2000mm |
|
| 3 | Pierwszy kąt obrotu osi | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | Kąt obrotu drugiej osi | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | Znamionowa prędkość obrotu w górę pierwszej osi | 50°/S | 50°/S | 15°/S |
| 50°/S | 50°/S | 17°/S |
| 17°/S | 17°/S | 17°/S |
|
| 6 | Znamionowa prędkość obrotowa drugiej osi | 70°/S | 70°/S | 70°/S |
| 70°/S | 70°/S | 17°/S |
| 24°/S | 17°/S | 24°/S |
|
| 7 | Powtarzalna dokładność pozycjonowania | ±0,10 mm | ±0,15 mm | ±0,20 mm |
| ±0,10 mm | ±0,10 mm | 17°/S |
| ±0,15 mm | ±0,20 mm | ±0,25 mm |
|
| 8 | Wymiar graniczny ramy przemieszczenia (długość × szerokość × wysokość) | 1200 mm × 600 mm × 70 mm | 1600 mm × 800 mm × 90 mm | 2000 mm × 1200 mm × 90 mm |
| - | - | - |
| - | - | - |
|
| 9 | Całkowite wymiary przesuwnika położenia (długość × szerokość × wysokość) | 2000 mm × 1100 mm × 1700 mm | 2300 mm × 1200 mm × 1900 mm | 2700 mm × 1500 mm × 2200 mm |
| 1500 mm × 500 mm × 850 mm | 2000 mm × 750 mm × 1200 mm | 2400 mm × 900 mm × 1600 mm |
| 4200 mm × 700 mm × 1800 mm | 5500 mm × 900 mm × 2200 mm | 6500 mm × 1200 mm × 2600 mm |
|
| 10 | Standardowa dwuosiowa płyta obrotowa | - | - | - | - | Φ800 mm | Φ1200 mm | Φ1500mm |
| Φ1500mm | Φ1800mm | Φ2000 mm |
|
| 11 | Wysokość środka pierwszego obrotu osi
| 1200 mm | 1350 mm | 1600 mm |
| 550 mm | 800 mm | 1000 mm |
| 1500 mm | 1750 mm | 2200 mm |
|
| 12 | Warunki zasilania | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Z transformatorem izolacyjnym | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Z transformatorem izolacyjnym | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Trójfazowy 200 V ± 10% 50 Hz | Z transformatorem izolacyjnym |
| 13 | Klasa izolacji | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | Masa netto sprzętu | Około 800 kg | Około 1300 kg | Około 2000 kg |
| Około 900 kg | Około 1600 kg | Około 2500 kg |
| Około 2200 kg | Około 4000 kg | Około 6000 kg | |
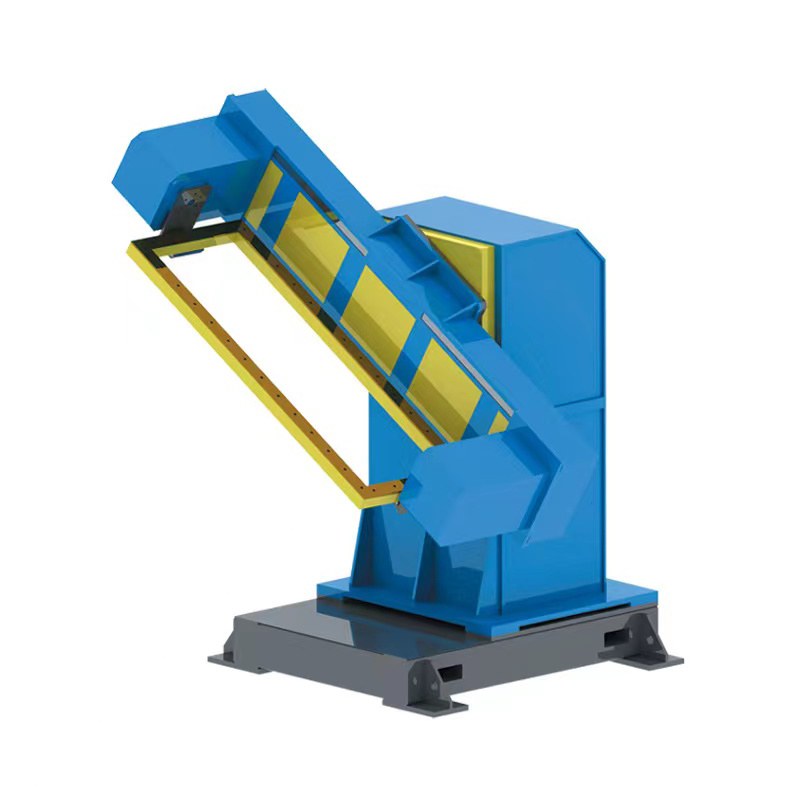
Serwopozycjoner dwuosiowy typu C
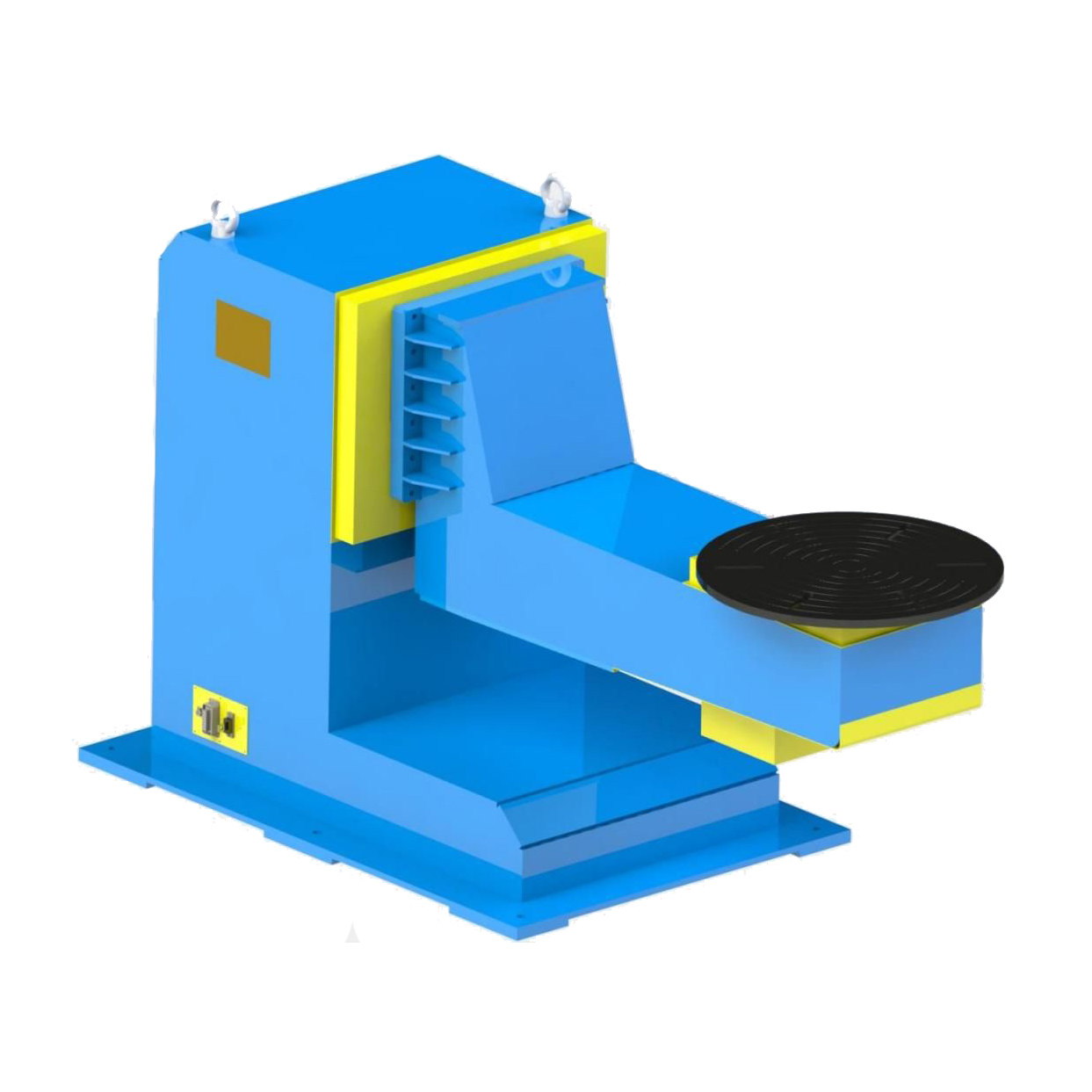
Serwopozycjoner dwuosiowy typu L

Serwopozycjoner dwuosiowy typu U
Wprowadzenie do struktury
Dwuosiowy serwonapęd składa się głównie ze spawanej, integralnej ramy, spawanej ramy przesuwu, serwosilnika prądu przemiennego i precyzyjnego reduktora RV, podpory obrotowej, mechanizmu przewodzącego, osłony ochronnej oraz elektrycznego układu sterowania. Spawana, integralna rama jest spawana z wysokiej jakości profili. Po wyżarzeniu i odprężeniu, rama jest poddawana profesjonalnej obróbce mechanicznej, aby zapewnić wysoką dokładność obróbki i precyzję kluczowych pozycji. Powierzchnia jest natryskiwana farbą antykorozyjną, która jest piękna i błyszcząca, a kolor można dostosować do wymagań klienta.
Spawana rama wyporowa zostanie zespawana i uformowana z wysokiej jakości stali profilowej, a następnie poddana profesjonalnej obróbce mechanicznej. Powierzchnia zostanie obrobiona standardowymi otworami na śruby do montażu narzędzi pozycjonujących, a następnie pomalowana, poczerniona i zabezpieczona antykorozyjnie.
Platforma obrotowa wybiera wysokiej jakości stal profilową po profesjonalnej obróbce mechanicznej, a powierzchnia jest obrabiana za pomocą standardowych otworów na śruby w celu montażu narzędzi pozycjonujących; następnie przeprowadza się czernienie i obróbkę zapobiegającą rdzewieniu.
Wybór serwosilnika prądu przemiennego i reduktora RV jako mechanizmu napędowego zapewnia stabilność obrotu, dokładność pozycjonowania, długą żywotność i niską awaryjność. Mechanizm przewodzący wykonany jest z mosiądzu, który charakteryzuje się dobrym przewodnictwem. Podstawa przewodząca posiada integralną izolację, która skutecznie chroni serwosilnik, robota i źródło zasilania spawarki.
W układzie sterowania elektrycznego zastosowano japoński sterownik PLC Omron do sterowania pozycjonerem, zapewniający stabilną pracę i niską awaryjność. Komponenty elektryczne pochodzą od renomowanych marek krajowych i zagranicznych, co gwarantuje jakość i stabilność użytkowania.











